
 Il Polo Liceale Mattioli continua inesorabile il suo progetto di divulgazione scientifica grazie all’intervento di numerosi professionisti provenienti da tutto il mondo. L’appuntamento del Festival della Scienza Ad/Ventura tenutosi nel primo pomeriggio del 27 gennaio, intitolato “Learning to f̶l̶y̶ drive: è arrivato il momento della guida autonoma?”, ha visto protagonista un giovane dottorando del dipartimento di Ingegneria Meccanica della University of California di Santa Barbara, Francesco Seccamonte.
Il Polo Liceale Mattioli continua inesorabile il suo progetto di divulgazione scientifica grazie all’intervento di numerosi professionisti provenienti da tutto il mondo. L’appuntamento del Festival della Scienza Ad/Ventura tenutosi nel primo pomeriggio del 27 gennaio, intitolato “Learning to f̶l̶y̶ drive: è arrivato il momento della guida autonoma?”, ha visto protagonista un giovane dottorando del dipartimento di Ingegneria Meccanica della University of California di Santa Barbara, Francesco Seccamonte.
Nato a Pescara, si diploma nel 2012 presso il liceo classico G. D’Annunzio. Intraprende gli studi ingegneristici prima a Pavia e successivamente a Zurigo, dove ottiene la Laurea Magistrale. Nel 2019 lavora nella startup americana con sede a Singapore nuTonomy, l’ abbandona nel luglio dello stesso anno per tornare sui banchi, con l’aspirazione al dottorato.
Le origini del progetto
Come si intuisce dal titolo della conferenza, il giovane ingegnere ci ha pilotati, partendo dalle origini di un progetto ambizioso, attraverso i meandri della guida autonoma, tema attualissimo. Il primo tentativo di regolazione automatica della guida, successivamente rivelatosi essere di guida assistita, è avvenuto proprio in Italia nel 1998, a Bologna. 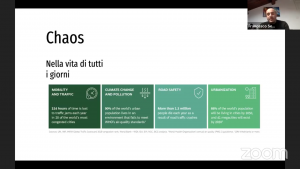
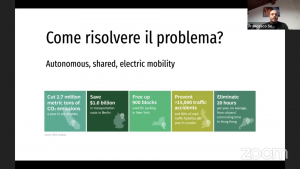
Le motivazioni di questo progetto, che tutt’ora rappresentano i motivi della ricerca, sono proprio quelli legati alla mobilità urbana, come la sicurezza stradale, l’inquinamento e il conseguente cambiamento climatico. Problemi che nel futuro potrebbero aggravarsi a causa della crescente urbanizzazione.
I vantaggi dell’attuazione di questa tecnologia non investono solo l’ambito ambientale, ma anche quello economico. Ad esempio, si potrebbero risparmiare 1.6 miliardi di dollari solo nella metropoli di Berlino, oppure si potrebbero svuotare circa 900 km2 di parcheggi, permettendoci di reinventare completamente le nostre città.
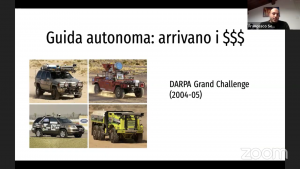
Il tentativo italiano ha causato una reazione a catena. L’agenzia governativa americana DARPA, tra il 2004 e il 2007, ha lanciato alla comunità scientifica una serie di challenge, con l’obiettivo di stimolare la ricerca in questo campo. Nonostante i risultati non sono commercializzabili, gli eventi hanno riscosso una risonanza mediatica enorme.
AVs: cosa c’è dentro?
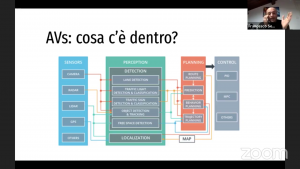
L’excursus sulle origini del progetto, necessario per contestualizzare il tutto, ha lasciato il posto alla parte maggiormente tecnica dell’incontro, in cui vengono analizzati i componenti cardine dell’architettura di un’auto a guida autonoma. In particolare, il dottorando ha svelato i segreti che vi sono dietro la progettazione di un Automatic Vehicle. Il punto di partenza è la pipeline, lo schema di sviluppo, utilizzato ormai da quasi tutte le odierne potenze dell’informatica. Esso è composto di cinque macroaree di competenza.
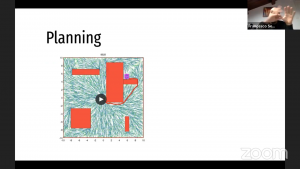
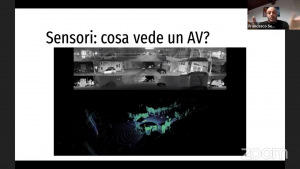
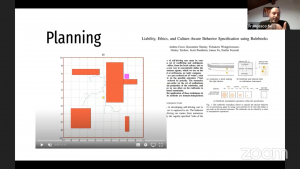
Prima fra tutte la sezione dei sensori, composto non dalle telecamere e dai radar presenti sulle normali autovetture, ma componenti hardware caratteristici, come l’IMU e il LIDAR. Questi ci permettono di conoscere lo stato del veicolo e dell’ambiente circostante. Si passa poi al modulo di Perception, che elabora i dati grezzi forniti dai sensori e classifica le entità presenti nei dintorni. Successivamente opera il modulo di Motion Planning il quale, ricevuti i dati dal Perception, attraverso degli algoritmi, programma le manovre utili allo spostamento. Il modulo seguente è quello dei controlli, attraverso il quale il percorso programmato diviene gesto fisico, che porta l’auto a spostarsi. Inoltre, questa macroarea è la stessa che si occupa di effettuare le manovre di sicurezza in caso di pericolo.
Infine troviamo il modulo delle mappe, da cui le aziende dipendono enormemente, sia in termini di scelta di software, sia in termini economici. Il sistema necessita di mappe super dettagliate e sempre aggiornate, che limitano il potenziale dello schema di sviluppo standard. È per questo motivo che, afferma Seccamonte, alcune aziende stanno sviluppando degli approcci non convenzionali, come nel caso di Mapless e del Sistema Wayve.
Tutto qui?
La magia dell’automazione non si ferma tuttavia al singolo veicolo. L’azienda che fornisce il servizio, grazie alla simulazione digitale, è in grado di gestire e coordinare numerosi veicoli contemporaneamente. Inoltre, a questo processo si aggiunge anche una normativa, la ISO 26262, che permette ai software di adeguarsi alle direttive degli enti competenti.
Seccamonte ha poi sottolineato quanto questo campo sia interdisciplinare e come ambiti quali l’architettura, la psicologia, l’ingegneria elettronica e meccanica siano importanti nella realizzazione di un prodotto commerciale come quello delle autovetture.
Il convegno si è concluso con un invito da parte dell’ingegnere ad intraprendere studi che possano contribuire allo sviluppo della realizzazione di auto a guida autonoma. Un invito a “volare” alto, a credere sempre nelle proprie capacità.
di Giuseppe Colameo e Marina D’Aulerio






{kind=link}